Good news everyone, from now on you’re getting a brand new node able to talk to your loaded-with-firmata Microcontroller Boards (like Arduino, Teensy, Particle.io, …):
- FirmataBoard (Devices)
Together with jens.a.euser (author of the original Arduino (Devices StandardFirmata 2.x)node ) we’ve looked for a more convenient, easier and faster way to patch microcontroller related ahhmm… patches.
With this implementation:
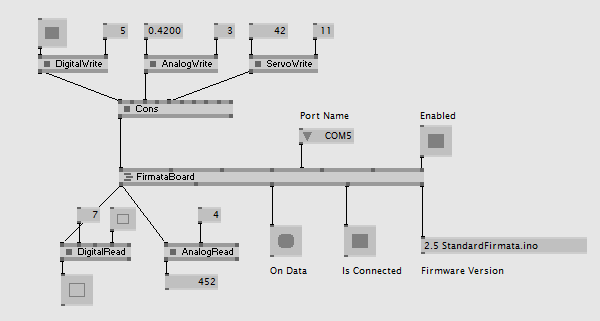
- Just plug a DigitalWrite (Firmata), AnalogWrite (Firmata) or ServoWrite (Firmata) node to the FirmataBoard node (or concatenate them together) to set the pins of the Board.
- Connect DigitalRead (Firmata) and AnalogRead (Firmata) nodes to get the values from the Board’s pins.
- Use the Sysex Messagespin output to receive different ‘Sysex Messages’ sent back by the Microcontroller Board. Some Sysex decoders are already there (see StringDecoder (Firmata), CapabilityResponse (Firmata), FirmwareResponse (Firmata)). Sending custom ‘Sysex Messages’ is easy as well.
- The node is able to talk to any microcontroller board loaded with the standardized Firmata firmware without any further configuration. In the Arduino-world such Firmata firmware is called “StandardFirmata”.
- Have some custom Firmata running on your chip? Just provide the configuration manually using the BoardConfig (Firmata).
Easier than ever before:
- no need to supply a spread for all 20 pins and then SetSlice some of them to particular values.
- no need to define the ‘PinMode’ for each pin.
- no need to define which pins should report their values back.
Thanks:
Hardware for the development was kindly provided by QUADRATURE.
p.s. Oh, by the way, these new Firmata nodes are fully implemented in VL.
p.p.s. And of course there are some caveats.
- The Cons (Firmata) has only 5 input pins which are interleaved with ‘BinSize’ pins. But note that you can cons multiple cons nodes… (for now)
- The VL nodes eat more processor ticks as their C# counterparts. Working on it…
The nodes are now available in Alpha Builds.
This is a rework of the original release of ‘Arduino Second Service’. See the previous (now outdated) blogpost.
Comments:
Comments are no longer accepted for this post.